Ford предлагает сторонним разработчикам данные, необходимые для создания самоуправляемых машин
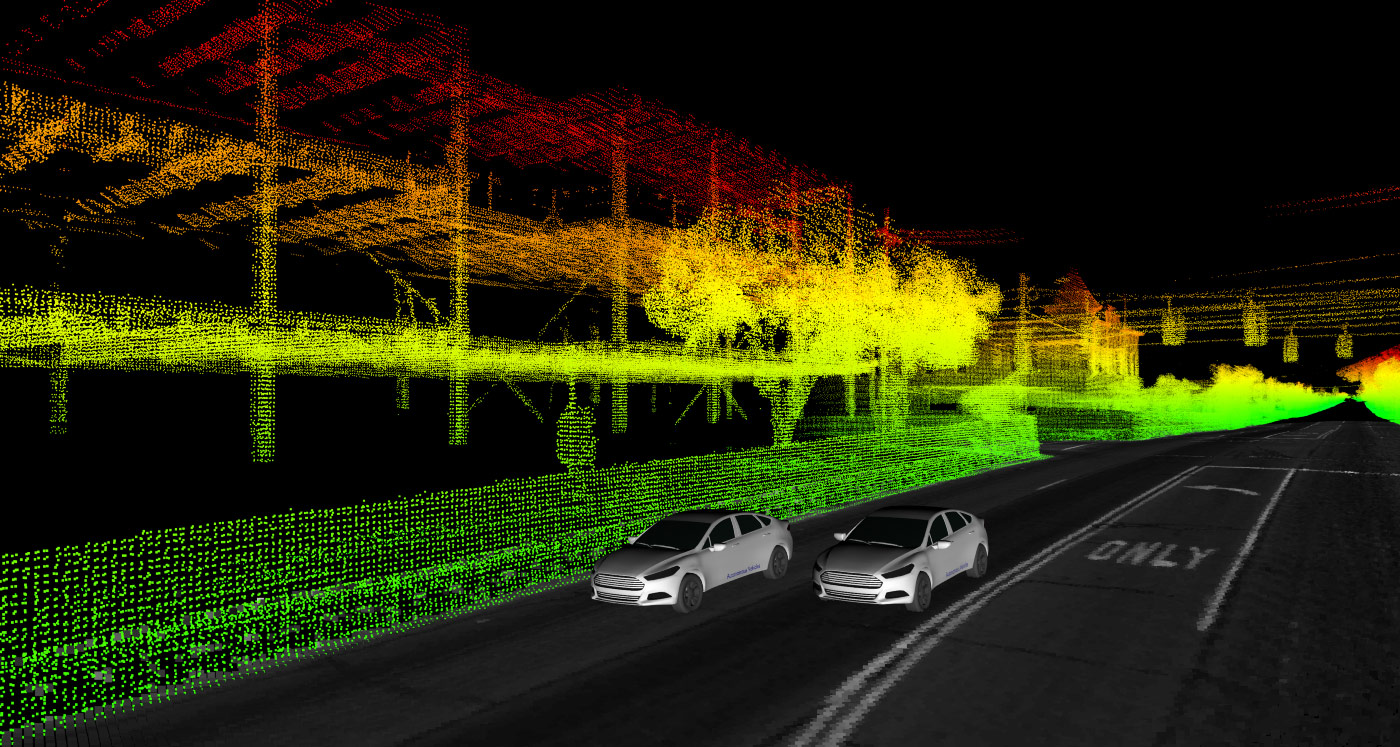
Самоуправляемые транспортные средства собирают огромное количество информации об окружающем мире с помощью камер и лидаров, чтобы постоянно оценивать окружающую обстановку. Опираясь на эти данные, они распознают находящиеся вокруг транспортные средства, пешеходов, знаки и другие объекты, что необходимо для безопасного движения.
Наборы данных, собранные автомобилями, необходимы инженерам и исследователям, создающим программное обеспечение для систем самоуправляемого движения. Чтобы стимулировать инновации в этой области, компания Ford приняла решение сделать собранные ее автомобилями данные доступными представителям академического и исследовательского сообщества.
Говоря более конкретно, Ford публикует данные, собранные несколькими тестовыми самоуправляемыми автомобилями в течение одного года. Набор данных включает в себя не только данные с лидаров и камер, информацию о GPS и маршрутах, но и уникальные элементы, например, карты отражающей способности земной поверхности, позволяющие понять, как машины Ford формируют представление об окружающем мире. Также доступен плагин, который может легко визуализировать данные, которые предлагаются в популярном формате ROS.
Компания отмечает, что ценность набору придает наличие данных за весь год, то есть охват сезонных колебаний, а также включение разнообразных дорожных условий. Данные собраны в городе Детройт и его окрестностях, так что описывают автострады, туннели, жилые микрорайоны, аэропорты и городские районы с плотной застройкой. Это делает их пригодными для моделирования различных сценариев, в которых могут оказаться автомобили с системами самоуправляемого движения.
Публикация данных уже началась.

{kind=link}